
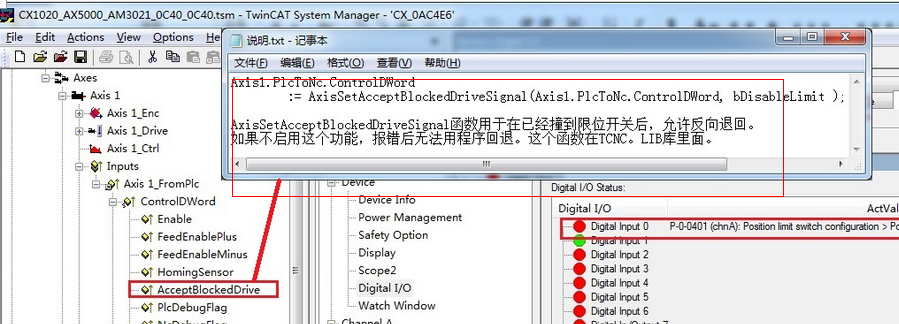
首先我碰到的问题是,伺服在运行过程中碰到限位无法使用程序回退的问题?
首先检查伺服驱动器版本,SystemManager的版本号,这一项检查不是必须的,但是11版本的伺服驱动器不管程序怎么运转都不行,所以碰到低版本的伺服以及Systemmanager需要向倍福供应商索取最新的版本文件覆盖到控制器CF卡中重启在做下一步操作!
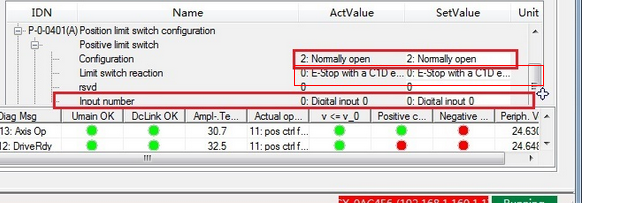
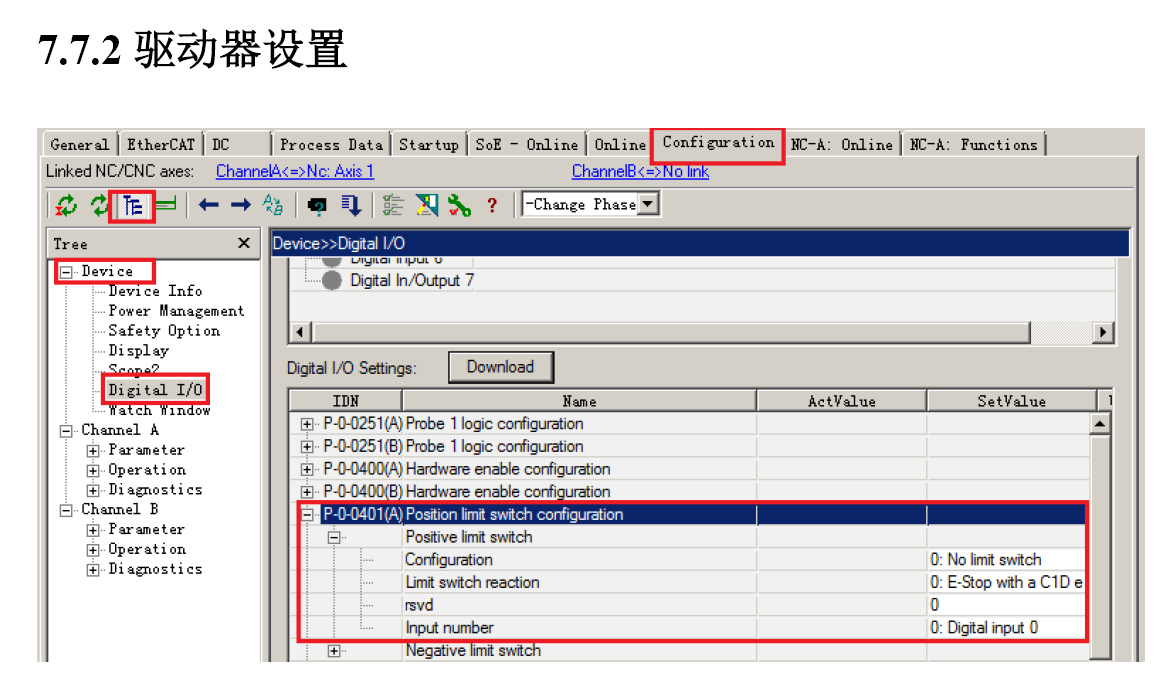
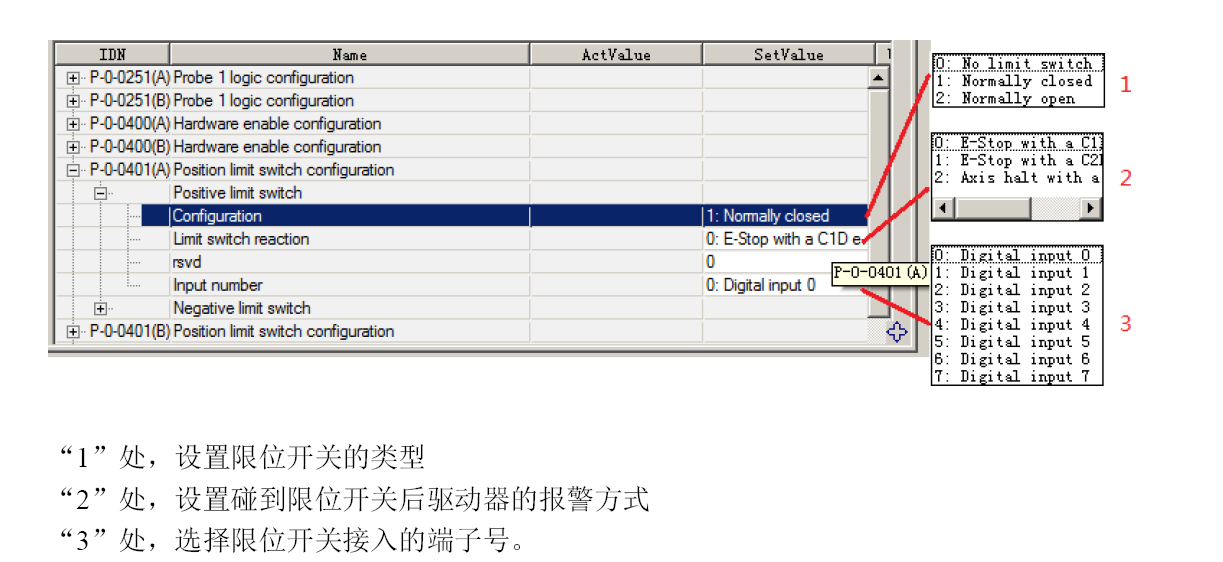
上一步确认没有问题以后,既然是硬件极限,把外部硬件限位开关接到伺服IO卡上,首先我们需要配置数字IO卡,如上图DigitalI/O P-0-0401参数,选择实际的输入号(Input number),选择合适的Limit switch reaction.重新激活配置。
这里实验的驱动器版本号为:202 manager版本号为2252. 经过我测试下来,不置位控制字,是无法达到程序回退功能的。
这里我测试了3种碰到限位的处理方式的现象,分别对应0,1,2.下面来分别说明几种方式的不同点。下面所有情况都是置位控制字的。
首先第一种方式:E-STOP WITH a C1D error
伺服在碰到前限位时,NC报18000(0X4650)报警,复位NC,复位驱动器,程序回退OK,但是还继续让伺服正转,伺服不动,但是会报跟随误差过大报警。
第二种方式:E-STOP with a C2D error
伺服在碰到前限位时,NC没有报警,直到报跟随误差过大报警。
第三种方式:Axis halt with a worring
伺服碰到前限位,没有报警,但是伺服会停止,如果这时还让伺服继续向前的话,会报跟随误差过大报警,程序回退控制OK
而如果在运行过程中,不操作控制字会是怎么样的情况呢,伺服限位工作正常,碰到限位会出现报警,但是伺服复位后,无法使能,READY信号一闪一闪,程序无法控制伺服回退。此时将控制字置ON,伺服使能OK,程序回退控制正常。
经过上述实际测试,工程程序做如下处理,伺服使能后,不要操作控制字置ON,当伺服运转碰到限位后,将控制字置ON,然后复位NC,复位驱动器,此时程序控制伺服回退操作OK,如果此时控制伺服继续向前运转,程序不会报警,但是过一段时间后,程序会报跟随误差过大报警。
注:当然,如果用户没有将跟随误差监控置为ON的话,NC系统是不会报跟随误差过大报警的。
上述为自己实际经验,下面为倍福工程师自己调试经验,请参考:


结合自身经验,匹配现场环境,优化控制程序。
