
针对目前机械连杆滑块切胚机系统存在的缺点,结合工业PC伺服控制技术与机械曲柄连杆滑块机构,提出了一种全新的连杆滑块切胚机控制方案。通过对曲柄连杆滑块机构的运动原理分析,建立电动机运动的数学模型,从而控制伺服电动机作变速运行,结合切胚工艺:同步、飞剪、倒角、修边等要求,最终实现合理的切胚机构往复切胚运动。系统以倍福PC为核心,对电动机转动角度作实时监测,实时改变伺服电机机转速,以保证滑台与泥胚的同步移动速度及精度。
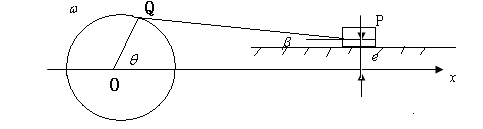
偏心曲柄连杆机构机械原理图如下

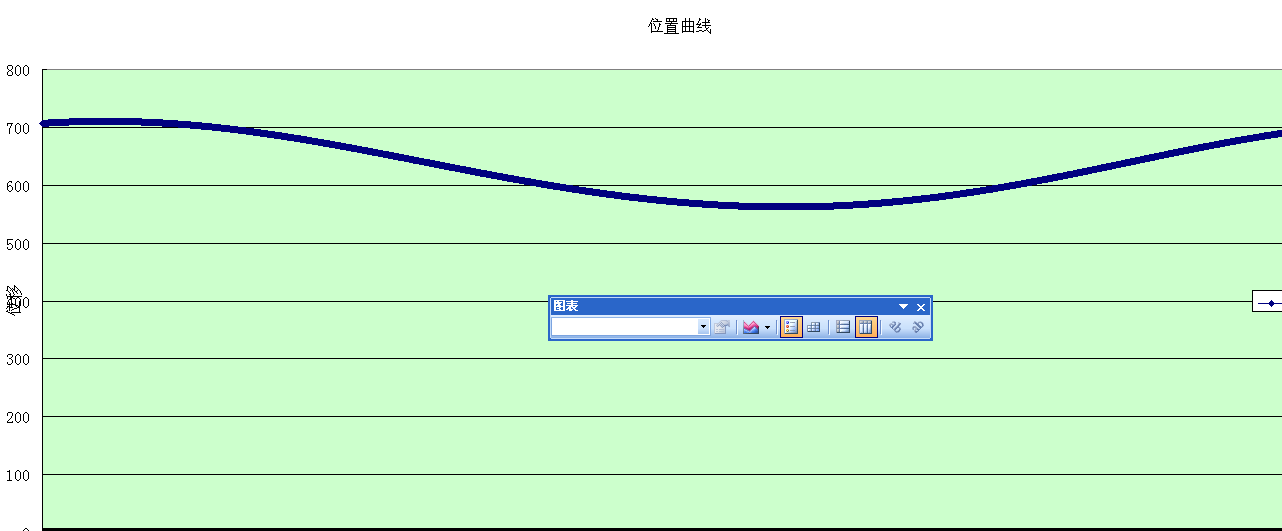
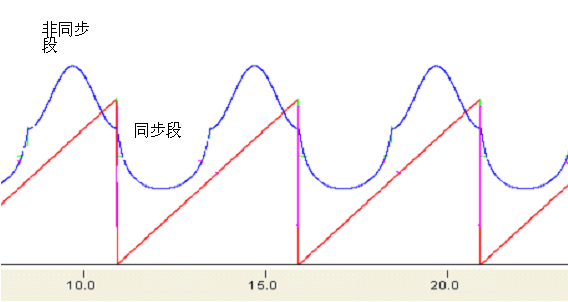
根据曲线图,可知滑块是在一定范围内来回往复运动
为保证泥胚不停机裁断精度,必须保证滑台的同步速度精度及同步点位置精度,然而电机减速机的角度与滑台位置是非线性的,如何通过电机变速实现裁断滑台装置的精确位置速度同步关系是该控制系统的难点。
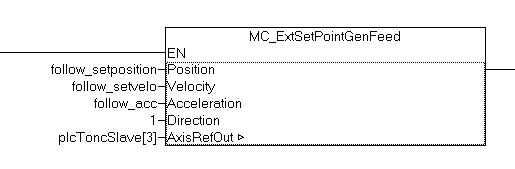
根据泥胚的实际速度,可以得出同步剪切段滑台的理论位置速度及位置,我们采取查表法,实时得出当前电机减速机的输出角度(即理论位置设定值),同时计算出速度,加速度前馈值,在倍福PC中采用位置发生器运动控制功能块,实现对伺服电机的位置速度控制
我们根据同步曲线的起点与终点位置,速度,在非同步段采用余弦曲线连接过度,保证最小连接及换向冲击,
查表功能块
UFB_Seatch(
rSourceIn:=(p_star- rXc_Test/100),
bPermutation:= TRUE,
iRangeStart:= i_star
iRangeEnd:= i_end,
stStack:=Stack ,
rNum=>S2 ,
bError=>bSeatch2Err);
平滑连接功能块
SmoothConnect(
rXcurrent:=rXc_Test ,
rXs:=rXs_Test,
rXe:=rXe_Test,
rYs:=rYs_Test,
rYe:=rYe_Test,
rKs:=rKs_Test,
rKe:=rKe_Test,
rYout=>rYout_Test );
倍福PC具备非常强的仿真运行功能,程序编译仿真运行后,电机速度及(主轴)位置关系曲线如下
结合倍福工业PC强大的运算能力及运动控制功能库,经过不断测试完善,在实机测试中取得了很好的效果,整机基本达到进口设备的效率和精度,该系统运行速度快,适应性强,机械结构简单,生产成本较低,目前已实际投产, 切胚效果良好。
